


怿星与于NI(恩艾)公司联合打造的L4自动驾驶数据回灌系统,在支持多种数据同步回灌、实时模拟故障、高带宽数据传输的同时,具有视频链路扩展性高、PXI机箱同步精度高等特点,能够为用户提供更快、更精、更实时的自动驾驶道路测试方案。
据行业专家和统计学预估,自动驾驶汽车需至少进行110亿英里的里程测试,消耗大约500年的驾驶时间,才能证明自动驾驶车辆的故障率低于人类驾驶员的故障率进而落地应用。实车道路测试是最可靠、最准确的测试方法,但由于时间和金钱成本过高,无法满足技术研究快速发展的需求。此外,自动驾驶道路测试在交通法规、极端场景、全球产业链等方面面临较多的局限性。
智驾数据回灌系统,将实车道路场景和数据在实验室回放,对智能驾驶控制器的感知算法和融合算法进行耐久和压力测试。
L4智驾回灌的特点和挑战,体现以下几点:
数据量级达几十甚至上百Gbps(高达数10路的800万/30FPS的高清摄像头、环视鱼眼摄像头、多路的激光雷达和毫米波雷达、车载总线数据和车载以太网数据)
图像帧和数据帧回灌同步精度高达亚毫秒级别,才能保证域控制器正确接收数据和做出响应
视频还原度高,不丢帧、不卡顿、高清实时还原
GPS和PPS信号同步优化问题,同时工作,互不干扰,稳定授时(精准秒脉冲),同时支持反向授时
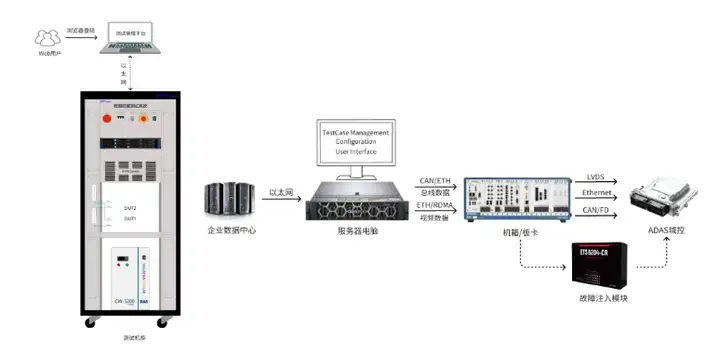
怿星基于NI(恩艾)公司的测试平台,给客户提供一整套数据回灌系统,整个系统由测试管理平台和测试机柜(集成测试硬件和软件)组成。
方案解读:
测试管理平台
SolarManager是一款怿星自研的 B/S 架构测试管理平台软件
支持 Web 端远程执行测试用例,远程查看测试结果
支持对人员、车型、样件、测试机柜、用例、计划、报告、缺陷的管理
支持同时调用多个测试服务器上不同的测试服务
支持多种统计视图,测试数据可视化
支持特定测试执行软件的测试用例一键导入
支持测试用例参数配置
支持异地协同办公
支持定制化对接第三方平台(邮件、钉钉、JIRA 等)
支持资产管理

测试机柜
PXI回灌系统:
PXI机箱,采用NI PXIe-1095,18槽,高达24 GB/s PXI机箱,每个插槽中都配备了高带宽背板和高达82W的电源和冷却功能;
CPU主板,采用PXIe-8881,3.9GHz8核PXI控制器 ,PXIe-8881是一款面向PXI Express系统的Intel Xeon 8核嵌入式控制器;
视频注入板卡,采用PXIe-1487,8路输出PXI FlexRIO GMSL™接口模块;
CAN总线板卡,采用PXIe-8510,是一款硬件可选的控制器局域网(CAN)和/或本地互连网络(LIN)接口,用于使用NI-XNET驱动程序开发应用程序;
车载以太网板卡,采用PXIe-8523,是一款100/1000BASE-T1非屏蔽双绞线(UTP)汽车以太网接口,用于结合NI-XNET驱动开发应用程序;
串口板卡,采用PXIe-8430/8,是一款高性能接口,可与RS232设备进行高速通信。它具有高性能DMA传输、多线程和多处理器支持;
RDMA网卡,采用PXIe-8285,是一款用于PXI Express的高性能25千兆位远程直接存储器访问(RDMA)接口;
时钟同步板卡,采用PXI-6683,定时和同步模块使用GPS、IEEE 1588和IRIGB来同步PXI和PXI Express系统,以执行同步事件;
总线故障注入模块:怿星自研总线故障注入模块,支持CAN/LIN/ETH故障仿真;支持电源短路、接地短路、信号短路、信号断路仿真;
服务器电脑:组装式高性能服务器电脑,用于数据格式转换,参数配置、用户界面等;
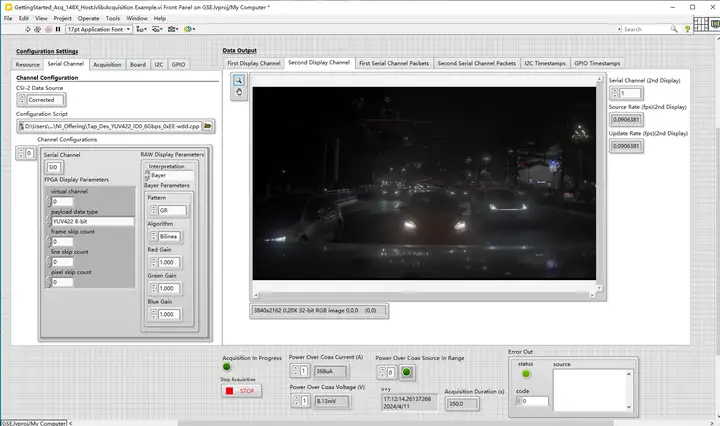
回灌测试软件:
环境配置(通道类型、IP地址、视频处理方式选取、Camera的分辨率、像素格式等)
故障注入界面操作和配置
加载和处理数据,控制回灌过程的播放、停止及时钟偏移
回灌系统运行状态,用于调试、监控及结果显示
视频链路扩展性高
视频链路有较高的扩展性,能兼容绝大部分串行芯片,同时支持GMSL和FPD-LINK;如果客户更换样件,只需进行相关适配,无需更换视频板卡即可使用
实时传输速率高
PXI机箱基于PCIe3.0标准,支持高带宽数据传输,且基于RDMA链路传输视频数据,传输速率高,易扩展,保证实时性
同步精度级别高
PXI机箱自身同步精度高,同步精度ns级别,PXI机箱包含专用的10 MHz系统参考时钟、能够满足高级定时和同步的需求。还可以使用基于绝对时间的同步方法,其中包括GPS、IEEE 1588或IRIG在内的多种时钟源
支持多种数据同步回灌、支持实时模拟故障
本次客户案例分享来自xx自动驾驶数据回灌系统项目。
客户需求:
回灌系统需能够解析数百台测试车路采记录的压缩数据,通过数据解析和组包还原并模拟自动驾驶系统的传感器和总线原始信号,注入自动驾驶域控制器模拟在实际驾驶环境的信号输入,使自动驾驶域控制器可以在实验室台架中运行,从而复现在自动驾驶道路测试中的问题。
多路高清摄像头、鱼眼摄像头、红外摄像头视频数据注入
多路激光雷达、毫米波雷达以太网100Base-T1/1000Base-T1数据注入
多路CAN/CANFD总线数据注入
GPS串口数据注入
PPS秒脉冲同步信号注入
实现多路视频、以太网、CAN总线数据高精度时间同步(同步精度达亚毫米级)
视频故障注入模拟(丢帧、重复帧、马赛克、信噪比等)
以太网故障模拟(丢帧、重复帧、时间戳跳变等)
总线故障注入(CAN/ETH对电源短路、对地短路、信号间短路和断路)
交付方案
采用第2章节标准方案交付2套数据回灌系统,方案细节不再赘述
客户对NI的硬件平台和怿星工程师的专业性给予肯定和高度表扬
L4自动驾驶域控制器,摄像头和雷达数量比较多,数据量比较大,该智驾数据回灌项目是NI和怿星合作的第一个L4的数据回灌项目。在项目开发过程中,双方遇到了很多技术难题和挑战,在双方工程师不断努力和突破下,将各个难题都逐个击破,为后续的高阶智驾控制器的回灌和仿真HIL项目打下良好的基础,积累了丰富的经验,也进一步加强和深化了双方的合作。